Introduction to the tsfeatures package
Yangzhuoran Yang and Rob J Hyndman
2026-06-30
Source:vignettes/tsfeatures.Rmd
tsfeatures.Rmdtsfeatures
The R package tsfeatures provides methods for extracting various features from time series data.
Installation
The stable version on R CRAN and can be installed in the usual way:
install.packages("tsfeatures")You can install the development version from Github with:
# install.packages("devtools")
devtools::install_github("robjhyndman/tsfeatures")Usage
The function tsfeatures() computes a tibble of time
series features from a list of time series.
mylist <- list(sunspot.year, WWWusage, AirPassengers, USAccDeaths)
tsfeatures(mylist)
#> # A tibble: 4 × 20
#> frequency nperiods seasonal_period trend spike linearity curvature e_acf1
#> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl>
#> 1 1 0 1 0.125 2.10e-5 3.58 1.11 0.793
#> 2 1 0 1 0.985 3.01e-8 4.45 1.10 0.774
#> 3 12 1 12 0.991 1.46e-8 11.0 1.09 0.509
#> 4 12 1 12 0.802 9.15e-7 -2.12 2.85 0.258
#> # ℹ 12 more variables: e_acf10 <dbl>, entropy <dbl>, x_acf1 <dbl>,
#> # x_acf10 <dbl>, diff1_acf1 <dbl>, diff1_acf10 <dbl>, diff2_acf1 <dbl>,
#> # diff2_acf10 <dbl>, seasonal_strength <dbl>, peak <dbl>, trough <dbl>,
#> # seas_acf1 <dbl>The default functions that tsfeatures uses to compute
features are frequency, stl_features,
entropy and acf_features. Each of them can
produce one or more features. Detailed information of features included
in the tsfeatures package are described below. Functions from
other packages, or user-defined functions, may also be used.
# Function from outside of tsfeatures package being used
is.monthly <- function(x) {
frequency(x) == 12
}
tsfeatures(mylist, features = "is.monthly")
#> # A tibble: 4 × 1
#> is.monthly
#> <dbl>
#> 1 0
#> 2 0
#> 3 1
#> 4 1List of features
acf_features
We compute the autocorrelation function of the series, the
differenced series, and the twice-differenced series.
acf_features produces a vector comprising the first
autocorrelation coefficient in each case, and the sum of squares of the
first 10 autocorrelation coefficients in each case.
acf_features(AirPassengers)
#> x_acf1 x_acf10 diff1_acf1 diff1_acf10 diff2_acf1 diff2_acf10
#> 0.9480 5.6701 0.3029 0.4088 -0.1910 0.2508
#> seas_acf1
#> 0.7604arch_stat
arch_stat Computes a statistic based on the Lagrange
Multiplier (LM) test of Engle (1982) for
autoregressive conditional heteroscedasticity (ARCH). The statistic
returned is the
value of an autoregressive model of order specified as lags applied to
.
arch_stat(AirPassengers)
#> ARCH.LM
#> 0.9172autocorr_features
The autocorrelation feature set from software package hctsa
autocorr_features(AirPassengers)
#> embed2_incircle_1 embed2_incircle_2 ac_9 firstmin_ac
#> 0.0000 0.0000 0.6709 8.0000
#> trev_num motiftwo_entro3 walker_propcross
#> -4902.1958 1.1302 0.2028-
ac_9is the autocorrelation at lag 9. -
embed2_incirclegives proportion of points inside a given circular boundary in a 2-d embedding space. -
firstmin_acreturns the time of first minimum in the autocorrelation function. -
trev_numreturns the numerator of the trev function of a time series, a normalized nonlinear autocorrelation. The time lag is set to 1. -
motiftwo_entro3finds local motifs in a binary symbolization of the time series. Coarse-graining is performed. Time-series values above its mean are given 1, and those below the mean are 0.motiftwo_entro3returns the entropy of words in the binary alphabet of length 3. -
walker_propcrosssimulates a hypothetical walker moving through the time domain. The hypothetical particle (or ‘walker’) moves in response to values of the time series at each point. The walker narrows the gap between its value and that of the time series by 10.walker_propcrossreturns the fraction of time series length that walker crosses time series.
binarize_mean
binarize_mean converts an input vector into a binarized
version. Time-series values above its mean are given 1, and those below
the mean are 0.
str(binarize_mean(AirPassengers))
#> num [1:144] 0 0 0 0 0 0 0 0 0 0 ...compengine feature set
compengine calculate the features that have been used in
the CompEngine database,
using a method introduced in package kctsa.
The features involved can be grouped as autocorrelation, prediction,
stationarity, distribution, and scaling, which can be computed using
autocorr_features, pred_features,
station_features, dist_features, and
scal_features.
comp <- compengine(AirPassengers)
knitr::kable(comp)| x | |
|---|---|
| embed2_incircle_1 | 0.0000 |
| embed2_incircle_2 | 0.0000 |
| ac_9 | 0.6709 |
| firstmin_ac | 8.0000 |
| trev_num | -4902.1958 |
| motiftwo_entro3 | 1.1302 |
| walker_propcross | 0.2028 |
| localsimple_mean1 | 2.0000 |
| localsimple_lfitac | 3.0000 |
| sampen_first | Inf |
| std1st_der | 33.7543 |
| spreadrandomlocal_meantaul_50 | 13.8800 |
| spreadrandomlocal_meantaul_ac2 | 38.8900 |
| histogram_mode_10 | 125.0000 |
| outlierinclude_mdrmd | 0.4167 |
| fluctanal_prop_r1 | 0.7692 |
crossing_points
crossing points are defined as the number of times a
time series crosses the median line.
crossing_points(AirPassengers)
#> crossing_points
#> 7dist_features
The distribution feature set from the hctsa package.
The scaling feature set from hctsa.
dist_features(AirPassengers)
#> histogram_mode_10 outlierinclude_mdrmd
#> 125.0000 0.4167-
histogram_modemeasures the mode of the data vector using histograms with a given number of bins (default to 10) as suggestion. -
outlierinclude_mdrmdmeasures the median as more and more outliers are included in the calculation according to a specified rule, of outliers being furthest from the mean. The threshold for including time-series data points in the analysis increases from zero to the maximum deviation, in increments of 0.01*sigma (by default), where sigma is the standard deviation of the time series. At each threshold, proportion of time series points included and median are calculated, and outputs from the algorithm measure how these statistical quantities change as more extreme points are included in the calculation.outlierinclude_mdrmdessentially returns the median of the median of range indices.
entropy
The spectral entropy is the Shannon entropy
where
is an estimate of the spectral density of the data. This measures the
“forecastability” of a time series, where low values indicate a high
signal-to-noise ratio, and large values occur when a series is difficult
to forecast.
entropy(AirPassengers)
#> entropy
#> 0.2961firstzero_ac
firstzero_ac returns the first zero crossing of the
autocorrelation function.
firstzero_ac(AirPassengers)
#> [1] 52flat_spots
flat_spots are computed by dividing the sample space of
a time series into ten equal-sized intervals, and computing the maximum
run length within any single interval.
flat_spots(AirPassengers)
#> flat_spots
#> 18heterogeneity
The heterogeneity features measure the heterogeneity of
the time series. First, we pre-whiten the time series to remove the
mean, trend, and autoregressive (AR) information (Barbour & Parker
2014). Then we fit a
model to the pre-whitened time series,
,
to measure for autoregressive conditional heteroskedasticity (ARCH)
effects. The residuals from this model,
,
are also measured for ARCH effects using a second
model.
-
arch_acfis the sum of squares of the first 12 autocorrelations of . -
garch_acfis the sum of squares of the first 12 autocorrelations of . -
arch_r2is the value of an AR model applied to . -
garch_r2is the value of an AR model applied to .
The statistics obtained from are the ARCH effects, while those from are the GARCH effects. Note that the two values are used in the Lagrange-multiplier test of Engle (1982), and the sum of squared autocorrelations are used in the Ljung-Box test proposed by Ljung & Box (1978).
heterogeneity(AirPassengers)
#> Registered S3 method overwritten by 'quantmod':
#> method from
#> as.zoo.data.frame zoo
#> arch_acf garch_acf arch_r2 garch_r2
#> 0.2296 0.2277 0.2106 0.2102holt_parameters and hw_parameters
holt_parameters Estimate the smoothing parameter for the
level-alpha and the smoothing parameter for the trend-beta of Holt’s
linear trend method. hw_parameters considers additive
seasonal trend: ETS(A,A,A) model, returning a vector of 3 values: alpha,
beta and gamma.
holt_parameters(AirPassengers)
#> alpha beta
#> 0.9999 0.0001
hw_parameters(AirPassengers)
#> alpha beta gamma
#> 0.9934804 0.0001912 0.0005800hurst
We use a measure of the long-term memory of a time series
(hurst), computed as 0.5 plus the maximum likelihood
estimate of the fractional differencing order
given by Haslett & Raftery (1989). We add 0.5 to
make it consistent with the Hurst coefficient. Note that the fractal
dimension can be estimated as
.
hurst(AirPassengers)
#> hurst
#> 0.9992lumpiness and stability
Stability and lumpiness are two time series
features based on tiled (non-overlapping) windows. Means or variances
are produced for all tiled windows. Then stability is the
variance of the means, while lumpiness is the variance of
the variances.
max_level_shift, max_var_shift and max_kl_shift
These three features compute features of a time series based on
sliding (overlapping) windows. max_level_shift finds the
largest mean shift between two consecutive windows.
max_var_shift finds the largest variance shift between two
consecutive windows. max_kl_shift finds the largest shift
in Kulback-Leibler divergence between two consecutive windows. Each
feature returns a vector of 2 values: the size of the shift, and the
time index of the shift.
max_level_shift(AirPassengers)
#> max_level_shift time_level_shift
#> 54.5 127.0
max_var_shift(AirPassengers)
#> max_var_shift time_var_shift
#> 2342 117
max_kl_shift(AirPassengers)
#> max_kl_shift time_kl_shift
#> 0.121 132.000nonlinearity
The nonlinearity coefficient is computed using a
modification of the statistic used in Teräsvirta’s nonlinearity test.
Teräsvirta’s test uses a statistic
where SSE1 and SSE0 are the sum of squared residuals from a nonlinear
and linear autoregression respectively. This is non-ergodic, so instead,
we define it as
which will converge to a value indicating the extent of nonlinearity as
.
This takes large values when the series is nonlinear, and values around
0 when the series is linear.
nonlinearity(AirPassengers)
#> nonlinearity
#> 0.4239pacf_features
We compute the partial autocorrelation function of the series, the
differenced series, and the second-order differenced series. Then
pacf_features produces a vector comprising the sum of
squares of the first 5 partial autocorrelation coefficients in each
case.
pacf_features(AirPassengers)
#> x_pacf5 diff1x_pacf5 diff2x_pacf5 seas_pacf
#> 0.9671 0.2122 0.2477 -0.1354pred_features
The prediction feature set from the hctsa package. The
first two elements are obtained from localsimple_taurus
with different forecast methods (the mean, and an LS fit). The third is
from sampen_first.
pred_features(AirPassengers)
#> localsimple_mean1 localsimple_lfitac sampen_first
#> 2 3 Inf- Simple predictors using the past trainLength values of the time
series to predict its next value.
localsimple_tauresreturns the first zero crossing of the autocorrelation function of the residuals from this Simple local time-series forecasting. -
sampen_firstreturns the first Sample Entropy of a time series where the embedding dimension is set to 5 and the threshold is set to 0.3.sampencis the underlying function to calculate the first sample entropy with optional dimension and threshold settings.
sampenc(AirPassengers, M = 5, r = 0.3)
#> [1] Infscal_features
The scaling feature set from hctsa.
scal_features(AirPassengers)
#> fluctanal_prop_r1
#> 0.7692-
fluctanal_prop_r1implements fluctuation analysis. It fits a polynomial of order 1 and then returns the range. The order of fluctuations is 2, corresponding to root mean square fluctuations.
station_features
The stationary feature set from hctsa.
station_features(AirPassengers)
#> std1st_der spreadrandomlocal_meantaul_50
#> 33.75 12.88
#> spreadrandomlocal_meantaul_ac2
#> 38.90-
std1st_derreturns the standard deviation of the first derivative of the time series. - 100 time-series segments of length l are selected at random from the
time series and the mean of the first zero-crossings of the
autocorrelation function in each segment is calculated using
spreadrandomlocal_meantaul.
stl_features
stl_features Computes various measures of trend and
seasonality of a time series based on an STL decomposition. The
mstl function is used to do the decomposition.
nperiods is the number of seasonal periods in the data
(determined by the frequency of observation, not the observations
themselves) and set to 1 for non-seasonal data.
seasonal_period is a vector of seasonal periods and set to
1 for non-seasonal data.
The size and location of the peaks and troughs in the seasonal
component are used to compute strength of peaks (peak) and
strength of trough (trough).
The rest of the features are modifications of features used in Kang, Hyndman & Smith-Miles (2017). We extend the STL decomposition approach (Cleveland et al.1990) to handle multiple seasonalities. Thus, the decomposition contains a trend, up to seasonal components and a remainder component: where is the smoothed trend component, is the th seasonal component and is a remainder component. The components are estimated iteratively. Let be the estimate of at the th iteration, with initial values given as . The we apply an STL decomposition to to obtained updated estimates for . In practice, this converges quickly and only two iterations are required. To allow the procedure to be applied automatically, we set the seasonal window span for STL to be 21 in all cases. For a non-seasonal time series, we simply estimate where is computed using Friedman’s “super smoother” (Friedman 1984).
Strength of trend (trend) and strength of seasonality
(seasonal.strength) are defined as
If their values are less than 0, they
are set to 0, while values greater than 1 are set to 1. For non-seasonal
time series seasonal.strength is 0. For seasonal time
series, seasonal.strength is an M-vector, where M is the
number of periods. This is analogous to the way the strength of trend
and seasonality were defined in Wang, Smith & Hyndman (2006), Hyndman, Wang & Laptev (2015) and Kang, Hyndman & Smith-Miles (2017).
spike measures the “spikiness” of a time series, and is
computed as the variance of the leave-one-out variances of the remainder
component
.
linearity and curvature measures the
linearity and curvature of a time series calculated based on the
coefficients of an orthogonal quadratic regression.
We compute the autocorrelation function of
,
and e_acf1 and e_acf10 contain the first
autocorrelation coefficient and the sum of the first ten squared
autocorrelation coefficients.
stl_features(AirPassengers)
#> nperiods seasonal_period trend spike
#> 1.0000 12.0000 0.9910 3.0278
#> linearity curvature e_acf1 e_acf10
#> 1325.3317 131.0647 0.5092 0.9304
#> seasonal_strength peak trough
#> 0.9407 7.0000 11.0000unitroot_kpss and unitroot_pp
unitroot_kpss is a vector comprising the statistic for
the KPSS unit root test with linear trend and lag one, and
unitroot_pp is the statistic for the “Z-alpha” version of
PP unit root test with constant trend and lag one.
unitroot_kpss(AirPassengers)
#> [1] 2.739
unitroot_pp(AirPassengers)
#> [1] -6.566zero_proportion
Computes proporton of zeros in a time series.
zero_proportion(AirPassengers)
#> [1] 0Reproducing papers
Hyndman, Wang and Laptev (ICDM 2015)
Here we replicate the analysis in Hyndman, Wang & Laptev (ICDM 2015). However, note that crossing_points, peak and trough are defined differently in the tsfeatures package than in the Hyndman et al (2015) paper. Other features are the same.
library(tsfeatures)
library(dplyr)
yahoo <- yahoo_data()
hwl <- bind_cols(
tsfeatures(
yahoo,
c(
"acf_features", "entropy", "lumpiness",
"flat_spots", "crossing_points"
)
),
tsfeatures(yahoo, "stl_features", s.window = "periodic", robust = TRUE),
tsfeatures(yahoo, "max_kl_shift", width = 48),
tsfeatures(yahoo,
c("mean", "var"),
scale = FALSE, na.rm = TRUE
),
tsfeatures(yahoo,
c("max_level_shift", "max_var_shift"),
trim = TRUE
)
) |>
select(
mean, var, x_acf1, trend, linearity, curvature,
seasonal_strength, peak, trough,
entropy, lumpiness, spike, max_level_shift, max_var_shift, flat_spots,
crossing_points, max_kl_shift, time_kl_shift
)
# 2-d Feature space
library(ggplot2)
hwl_pca <- hwl |>
na.omit() |>
prcomp(scale = TRUE)
hwl_pca$x |>
as_tibble() |>
ggplot(aes(x = PC1, y = PC2)) +
geom_point()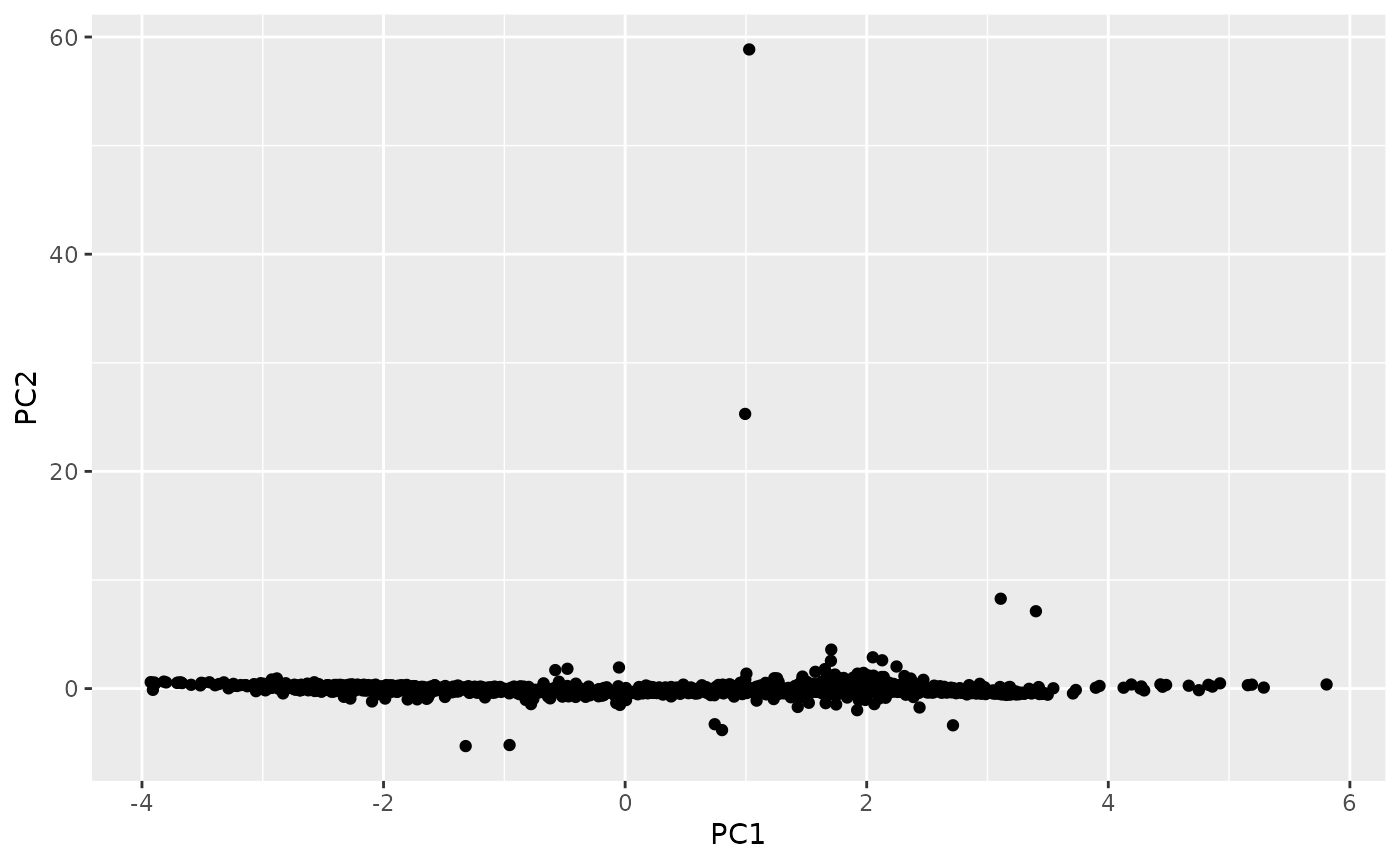
Kang, Hyndman & Smith-Miles (IJF 2017)
Compute the features used in Kang, Hyndman & Smith-Miles (IJF
2017). Note that the trend and ACF1 are computed differently for
non-seasonal data in the tsfeatures package than in the Kang et
al (2017). tsfeatures uses mstl which uses
supsmu for the trend calculation with non-seasonal data,
whereas Kang et al used a penalized regression spline computed using
mgcv instead. Other features are the same.
library(tsfeatures)
library(dplyr)
library(tidyr)
library(forecast)
M3data <- purrr::map(
Mcomp::M3,
function(x) {
tspx <- tsp(x$x)
ts(c(x$x, x$xx), start = tspx[1], frequency = tspx[3])
}
)
khs_stl <- function(x, ...) {
lambda <- BoxCox.lambda(x, lower = 0, upper = 1, method = "loglik")
y <- BoxCox(x, lambda)
c(stl_features(y, s.window = "periodic", robust = TRUE, ...), lambda = lambda)
}
khs <- bind_cols(
tsfeatures(M3data, c("frequency", "entropy")),
tsfeatures(M3data, "khs_stl", scale = FALSE)
) |>
select(frequency, entropy, trend, seasonal_strength, e_acf1, lambda) |>
replace_na(list(seasonal_strength = 0)) |>
rename(
Frequency = frequency,
Entropy = entropy,
Trend = trend,
Season = seasonal_strength,
ACF1 = e_acf1,
Lambda = lambda
) |>
mutate(Period = as.factor(Frequency))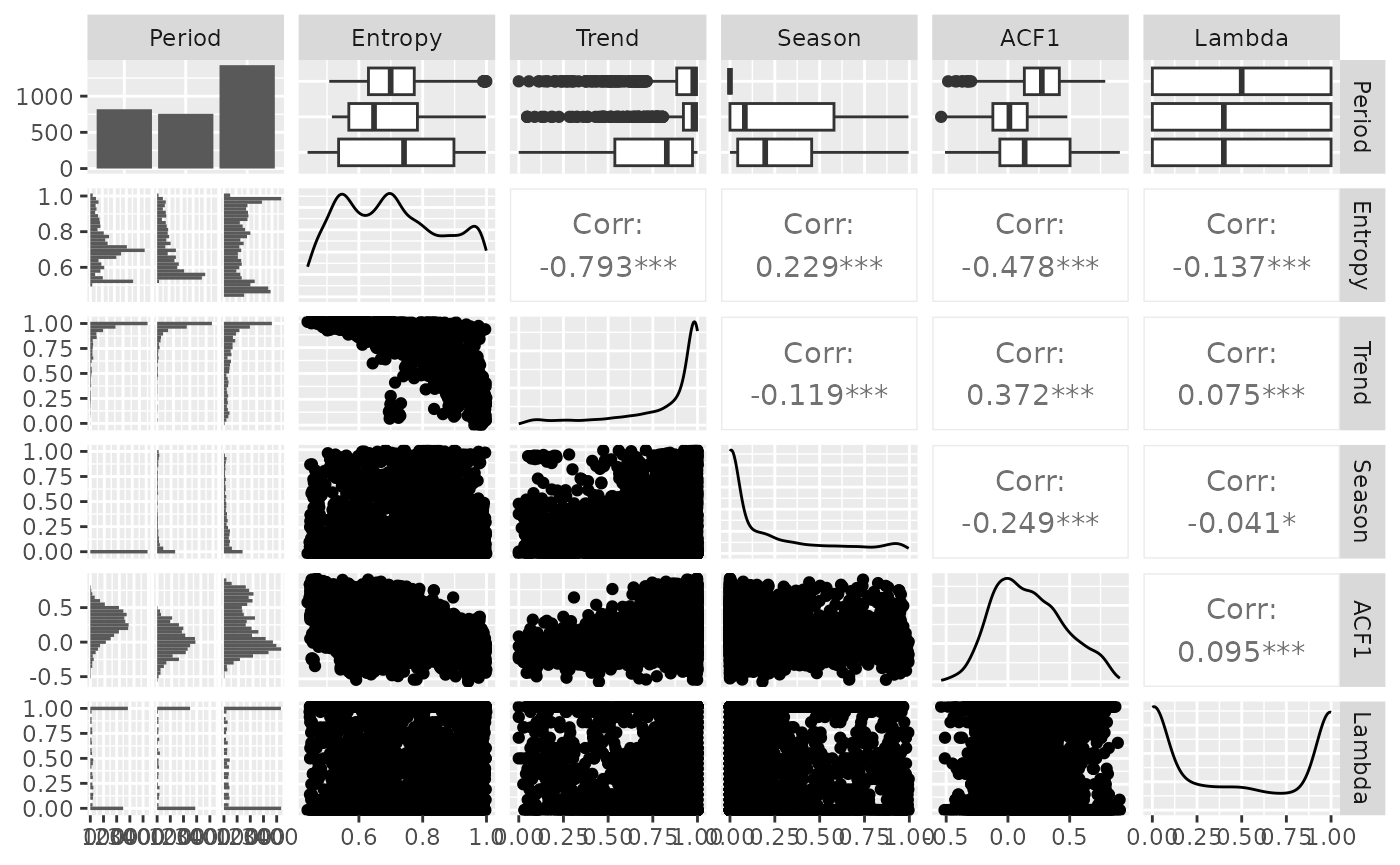
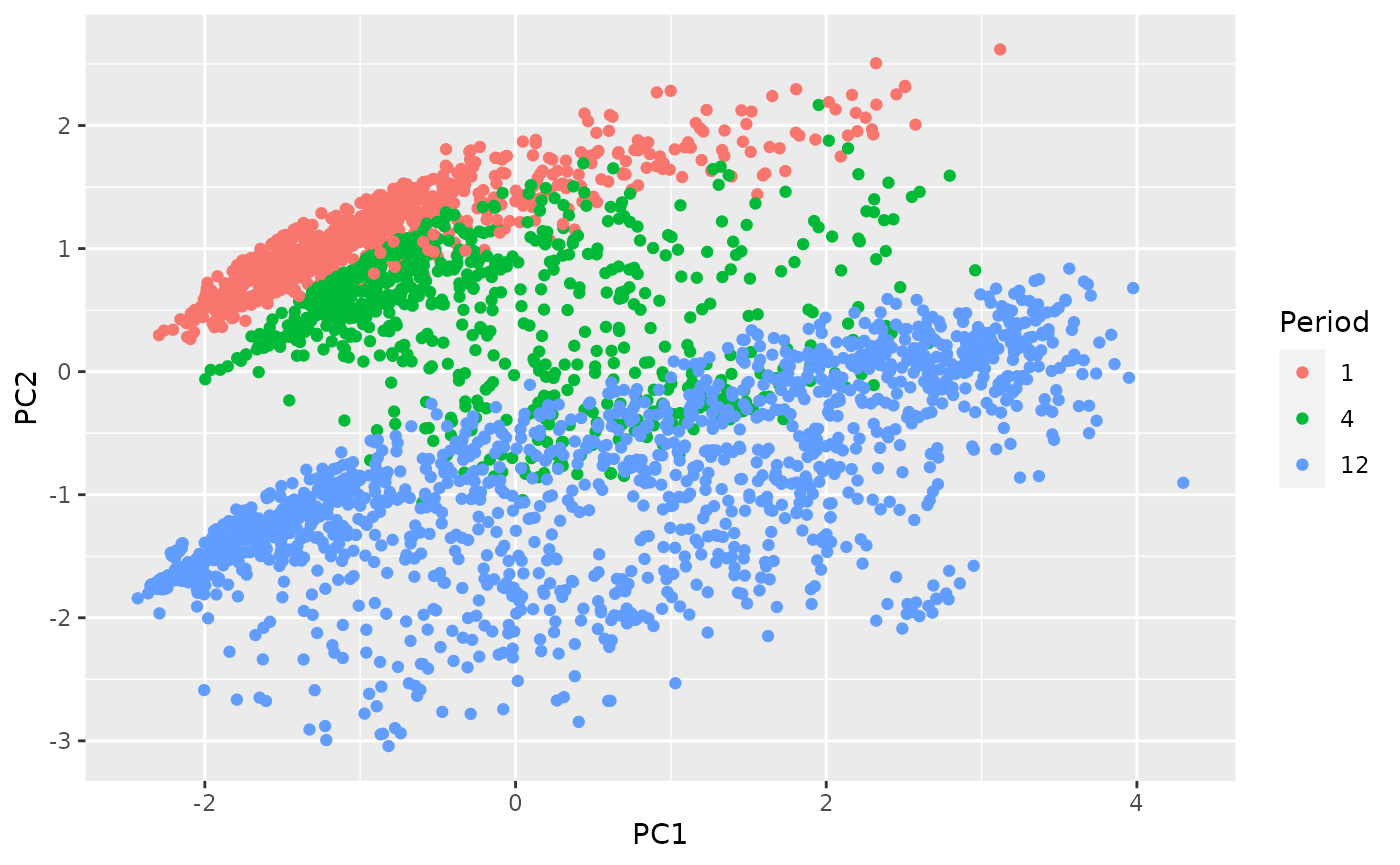
# 2-d Feature space (Top of Fig 2)
khs_pca <- khs |>
select(-Period) |>
prcomp(scale = TRUE)
khs_pca$x |>
as_tibble() |>
bind_cols(Period = khs$Period) |>
ggplot(aes(x = PC1, y = PC2)) +
geom_point(aes(col = Period))