Returns a time series based on the model object object.
Usage
# S3 method for ets
simulate(
object,
nsim = length(object$x),
seed = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
...
)
# S3 method for Arima
simulate(
object,
nsim = length(object$x),
seed = NULL,
xreg = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
lambda = object$lambda,
...
)
# S3 method for ar
simulate(
object,
nsim = object$n.used,
seed = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
...
)
# S3 method for lagwalk
simulate(
object,
nsim = length(object$x),
seed = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
lambda = object$lambda,
...
)
# S3 method for fracdiff
simulate(
object,
nsim = object$n,
seed = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
...
)
# S3 method for nnetar
simulate(
object,
nsim = length(object$x),
seed = NULL,
xreg = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
lambda = object$lambda,
...
)
# S3 method for modelAR
simulate(
object,
nsim = length(object$x),
seed = NULL,
xreg = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
lambda = object$lambda,
...
)
# S3 method for tbats
simulate(
object,
nsim = length(object$y),
seed = NULL,
future = TRUE,
bootstrap = FALSE,
innov = NULL,
...
)Arguments
- object
An object of class "
ets", "Arima", "ar" or "nnetar".- nsim
Number of periods for the simulated series. Ignored if either
xregorinnovare notNULL. Otherwise the default is the length of series used to train model (or 100 if no data found).- seed
Either
NULLor an integer that will be used in a call toset.seedbefore simulating the time series. The default,NULL, will not change the random generator state.- future
Produce sample paths that are future to and conditional on the data in
object. Otherwise simulate unconditionally.- bootstrap
Do simulation using resampled errors rather than normally distributed errors or errors provided as
innov.- innov
A vector of innovations to use as the error series. Ignored if
bootstrap==TRUE. If notNULL, the value ofnsimis set to length ofinnov.- ...
Other arguments, not currently used.
- xreg
New values of
xregto be used for forecasting. The value ofnsimis set to the number of rows ofxregif it is notNULL.- lambda
Box-Cox transformation parameter. If
lambda="auto", then a transformation is automatically selected usingBoxCox.lambda. The transformation is ignored if NULL. Otherwise, data transformed before model is estimated.
Details
With simulate.Arima(), the object should be produced by
Arima or auto.arima, rather than
arima. By default, the error series is assumed normally
distributed and generated using rnorm. If innov
is present, it is used instead. If bootstrap=TRUE and
innov=NULL, the residuals are resampled instead.
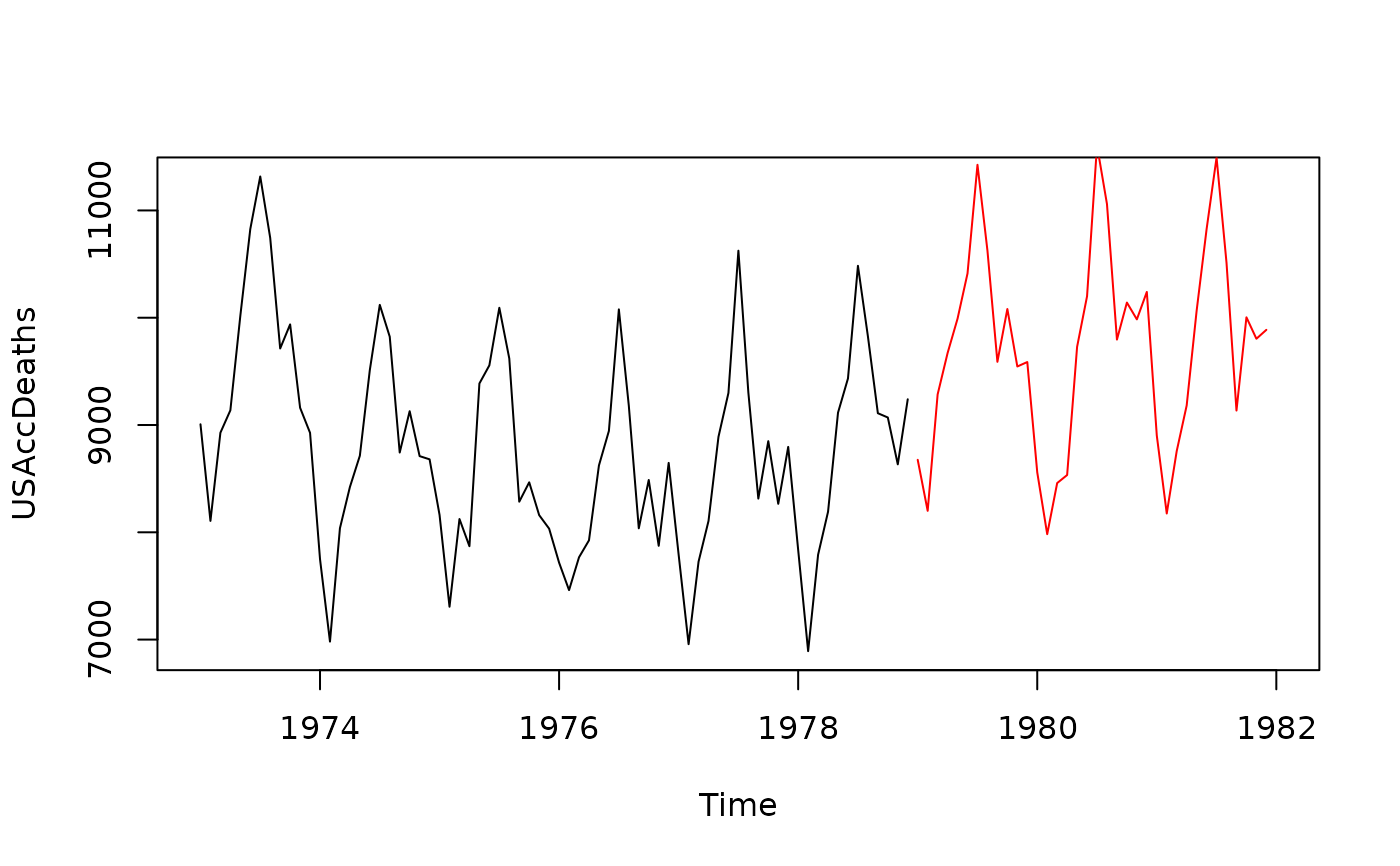
When future=TRUE, the sample paths are conditional on the data. When
future=FALSE and the model is stationary, the sample paths do not
depend on the data at all. When future=FALSE and the model is
non-stationary, the location of the sample paths is arbitrary, so they all
start at the value of the first observation.